
【行业】TOF有望成为3D感测主流方案(35页)
2020-01-07
3D 感测渗透加速,主流手机厂商加入 TOF 阵营。3D 感测技术路线很多,不同技术的性能不同,适合的应用领域也不同。在消费电子应用领域,目前主流的 3D 感测技术有两种:3D 结构光(3D StructureLight)和时间飞行法(TOF, Time of Flight)。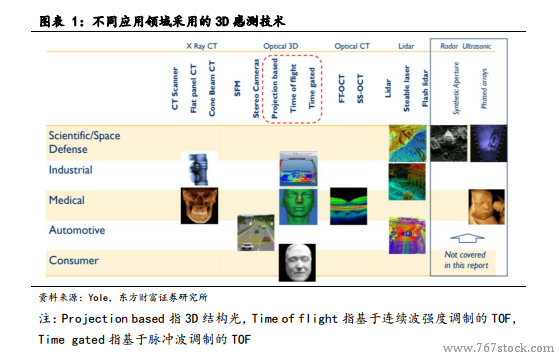 3D 结构光方案的原理是采用红外光源,发射出来的光经过一定的编码投影在物体上,这些图案经物体表面反射回来时,随着物体距离的不同会发生不同的形变,图像传感器将形变后的图案拍下来。基于三角定位法,可以通过计算拍下来的图案里的每个像素的变形量,来得到对应的视差,从而进一步得到深度值。
3D 结构光方案的原理是采用红外光源,发射出来的光经过一定的编码投影在物体上,这些图案经物体表面反射回来时,随着物体距离的不同会发生不同的形变,图像传感器将形变后的图案拍下来。基于三角定位法,可以通过计算拍下来的图案里的每个像素的变形量,来得到对应的视差,从而进一步得到深度值。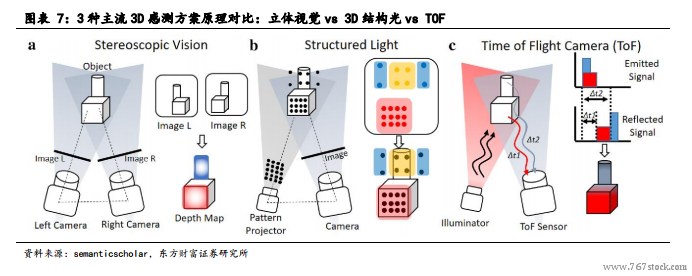
3D 结构光方案的原理是采用红外光源,发射出来的光经过一定的编码投影在物体上,这些图案经物体表面反射回来时,随着物体距离的不同会发生不同的形变,图像传感器将形变后的图案拍下来。基于三角定位法,可以通过计算拍下来的图案里的每个像素的变形量,来得到对应的视差,从而进一步得到深度值。




