
【行业】通信-放量在即激光雷达开启前装元年(31页)
2021-03-03
L3 为自动驾驶的分水岭,代表着主动权从人到车的转变,目前还存在监管和消费者教育等问题;在整车厂推出具有 L3 级功能的车型时,仍倾向于在宣传中定位为 L2.5 - L3 级别。作为“所见即所得”的传感器,激光雷达可增强感知系统的冗余性,补充毫米波雷达、摄像头缺失的场景,与高精地图配合发挥定位作用。在 L3 及以上级别的自动驾驶系统中,激光雷达的作用从辅助走向主导,配备个数也将增加。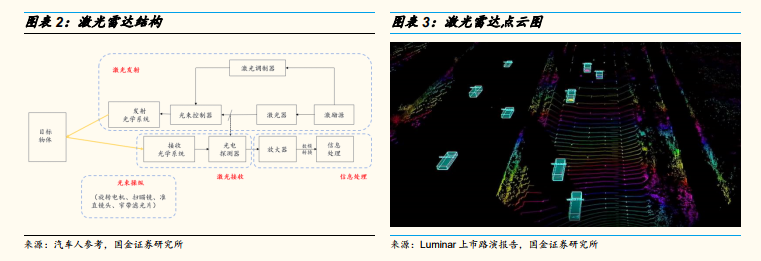 激光雷达可分为激光发射、激光接收、光束操纵和信息处理四大系统,通过分析激光信号描绘三维点云图,实现环境实时感知及避障功能。激光雷达(LiDAR,Light Detection And Ranging),采用激光发射器及光束扫描技术发射介于红外线与可见光之间的激光,通过测量激光信号的时间差及相位差描绘周围物体的三维点云图,从而获取精确距离、轮廓信息。激光雷达最早发明于 1960s,早期主要用于太空探测、气象监测、地形勘测、军事测距、武器制导等,自 2005 年美国 DARPA 挑战赛起首次搭载于自动驾驶车辆,目前广泛应用于自动驾驶、物流运输、高精地图、智慧交通、机器人、工业自动化、无人机、测绘等领域。
激光雷达可分为激光发射、激光接收、光束操纵和信息处理四大系统,通过分析激光信号描绘三维点云图,实现环境实时感知及避障功能。激光雷达(LiDAR,Light Detection And Ranging),采用激光发射器及光束扫描技术发射介于红外线与可见光之间的激光,通过测量激光信号的时间差及相位差描绘周围物体的三维点云图,从而获取精确距离、轮廓信息。激光雷达最早发明于 1960s,早期主要用于太空探测、气象监测、地形勘测、军事测距、武器制导等,自 2005 年美国 DARPA 挑战赛起首次搭载于自动驾驶车辆,目前广泛应用于自动驾驶、物流运输、高精地图、智慧交通、机器人、工业自动化、无人机、测绘等领域。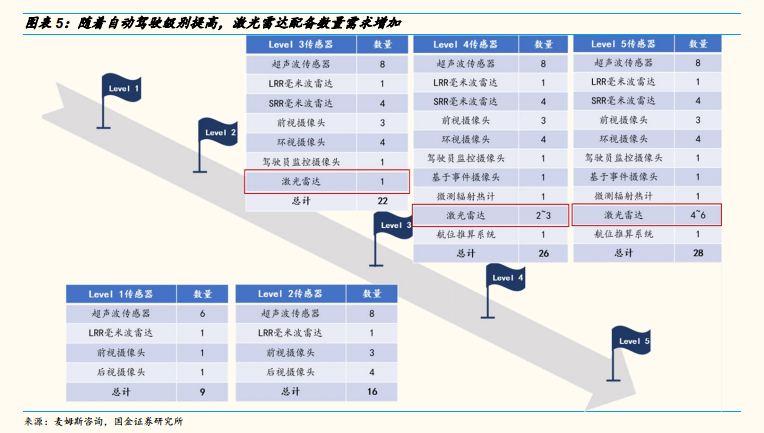 激光雷达最常见的显性参数包括线数、探测距离、测量精度、测量准度、扫描频率、垂直视场角、角分辨率、点云密度、功耗、集成度等。隐性指标主要指激光雷达产品的可靠性、安全性、可量产性及使用寿命等,缺乏公开信息及可量化系统,只能通过产品是否得到车规级行业认证、应用于整车厂或自动驾驶出租方案提供商的测试车队或量产项目来侧面了解。
激光雷达最常见的显性参数包括线数、探测距离、测量精度、测量准度、扫描频率、垂直视场角、角分辨率、点云密度、功耗、集成度等。隐性指标主要指激光雷达产品的可靠性、安全性、可量产性及使用寿命等,缺乏公开信息及可量化系统,只能通过产品是否得到车规级行业认证、应用于整车厂或自动驾驶出租方案提供商的测试车队或量产项目来侧面了解。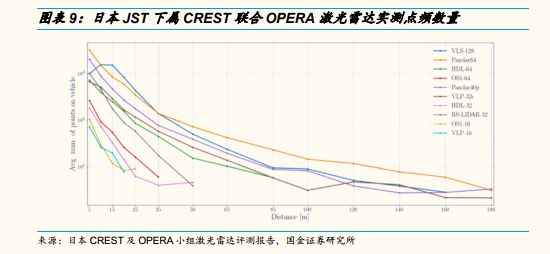
激光雷达可分为激光发射、激光接收、光束操纵和信息处理四大系统,通过分析激光信号描绘三维点云图,实现环境实时感知及避障功能。激光雷达(LiDAR,Light Detection And Ranging),采用激光发射器及光束扫描技术发射介于红外线与可见光之间的激光,通过测量激光信号的时间差及相位差描绘周围物体的三维点云图,从而获取精确距离、轮廓信息。激光雷达最早发明于 1960s,早期主要用于太空探测、气象监测、地形勘测、军事测距、武器制导等,自 2005 年美国 DARPA 挑战赛起首次搭载于自动驾驶车辆,目前广泛应用于自动驾驶、物流运输、高精地图、智慧交通、机器人、工业自动化、无人机、测绘等领域。
激光雷达最常见的显性参数包括线数、探测距离、测量精度、测量准度、扫描频率、垂直视场角、角分辨率、点云密度、功耗、集成度等。隐性指标主要指激光雷达产品的可靠性、安全性、可量产性及使用寿命等,缺乏公开信息及可量化系统,只能通过产品是否得到车规级行业认证、应用于整车厂或自动驾驶出租方案提供商的测试车队或量产项目来侧面了解。



