
【行业】激光雷达-L3自动驾驶有望成千亿赛道(24页)
2021-03-16
自动驾驶可分为感知、决策、执行三大步骤,其中感知主要由安装在汽车上的各类环境监测传感器完成。当前环境监测传感器主要包括车载摄像头、超声波雷达、毫米波雷达、激光雷达等。出于结构设计、器件成本、良率与一致性、研发投入、车规及可量产性等多方面因素,当前激光雷达单车成本仍远高于其他传感器件。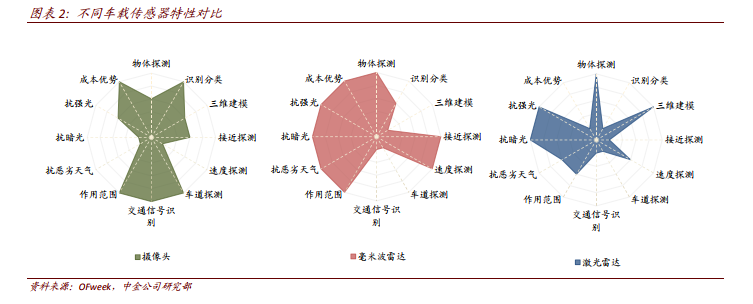 激光雷达对比车载摄像头:摄像头在物体外观及分类的识别上性能突出,但单纯依赖视觉方案存在以下隐患:1)光照依赖:光照情况不良时(强光/逆光/夜晚/恶劣天气),作用大幅受限;2)须 2D 转 3D:获取 2D 信息,需经算法处理转换为 3D 信息,在精确度和时效性不及能直接从外界获取位置信息的激光雷达;3)算力及成本:光学方案下,成熟算法要求海量数据作为训练基础以及更高芯片算力保障,相应成本水涨船高。
激光雷达对比车载摄像头:摄像头在物体外观及分类的识别上性能突出,但单纯依赖视觉方案存在以下隐患:1)光照依赖:光照情况不良时(强光/逆光/夜晚/恶劣天气),作用大幅受限;2)须 2D 转 3D:获取 2D 信息,需经算法处理转换为 3D 信息,在精确度和时效性不及能直接从外界获取位置信息的激光雷达;3)算力及成本:光学方案下,成熟算法要求海量数据作为训练基础以及更高芯片算力保障,相应成本水涨船高。 激光雷达并非完美,不同传感器需配合打造感知系统“完全体”:受制于激光的物理特性,激光雷达在雨雪、沙尘等极端天气环境下,工作可靠性会受到影响。伴随智能驾驶级别提升,需要不同种类的传感器达成冗余、相互配合。我们认为,在现有技术下,对于 L4-L5 高级别自动驾驶而言,激光雷达在传感器组合中具备不可替代性,仍为必备元件,与光学传感、雷达及 MEMS 传感器配合,共同打造感知系统“完全体”。
激光雷达并非完美,不同传感器需配合打造感知系统“完全体”:受制于激光的物理特性,激光雷达在雨雪、沙尘等极端天气环境下,工作可靠性会受到影响。伴随智能驾驶级别提升,需要不同种类的传感器达成冗余、相互配合。我们认为,在现有技术下,对于 L4-L5 高级别自动驾驶而言,激光雷达在传感器组合中具备不可替代性,仍为必备元件,与光学传感、雷达及 MEMS 传感器配合,共同打造感知系统“完全体”。
激光雷达对比车载摄像头:摄像头在物体外观及分类的识别上性能突出,但单纯依赖视觉方案存在以下隐患:1)光照依赖:光照情况不良时(强光/逆光/夜晚/恶劣天气),作用大幅受限;2)须 2D 转 3D:获取 2D 信息,需经算法处理转换为 3D 信息,在精确度和时效性不及能直接从外界获取位置信息的激光雷达;3)算力及成本:光学方案下,成熟算法要求海量数据作为训练基础以及更高芯片算力保障,相应成本水涨船高。
激光雷达并非完美,不同传感器需配合打造感知系统“完全体”:受制于激光的物理特性,激光雷达在雨雪、沙尘等极端天气环境下,工作可靠性会受到影响。伴随智能驾驶级别提升,需要不同种类的传感器达成冗余、相互配合。我们认为,在现有技术下,对于 L4-L5 高级别自动驾驶而言,激光雷达在传感器组合中具备不可替代性,仍为必备元件,与光学传感、雷达及 MEMS 传感器配合,共同打造感知系统“完全体”。



