
【行业】北斗系列-卫惯导航大有可为(52页)
2021-09-14
位置信息是自动驾驶车辆路径规划和车辆控制的基础,是自动驾驶实现的关键要素 :对比有人驾驶系统,人通过眼睛和耳朵感知周边环境,对比记忆做出决策,比如方向盘控制、加减速、变道、刹车等等;自动驾驶则通过车载雷达、 摄像头、GNSS/IMU等传感器搜集车辆位置信息,并以位置信息数据为基础,根据高算力的计算中心获取经过优化的驾驶决策,最后自动驾驶系统基于决策层给出的驾驶决策,对制动系统、发机转向等控下达指令,负责驾驶执行。 特斯拉纯视觉方案,依赖算法演进:业内纯视觉的自动驾驶方案以特斯拉为典型代表,目前特斯拉仍采用车载摄像头为主+毫米波雷达为辅的传感器配置,进一步在下一代自动驾驶套件V9上,特斯拉将移除雷达,完全采用全视觉方案。为了实现这一方案,特斯拉在深度学习算法上投入了相当大的力度,除开先前的影子模式训练(截至2020年已完成超30亿英里),进一步在特斯拉AI Day上,特斯拉公布了在神经网络、数据&数据标注、仿真等层面的持续创新,在Autopilot上进一步优化延迟问题的神经网络编辑器等改进,并发布Dojo用于在数据中心训练神经网络。
特斯拉纯视觉方案,依赖算法演进:业内纯视觉的自动驾驶方案以特斯拉为典型代表,目前特斯拉仍采用车载摄像头为主+毫米波雷达为辅的传感器配置,进一步在下一代自动驾驶套件V9上,特斯拉将移除雷达,完全采用全视觉方案。为了实现这一方案,特斯拉在深度学习算法上投入了相当大的力度,除开先前的影子模式训练(截至2020年已完成超30亿英里),进一步在特斯拉AI Day上,特斯拉公布了在神经网络、数据&数据标注、仿真等层面的持续创新,在Autopilot上进一步优化延迟问题的神经网络编辑器等改进,并发布Dojo用于在数据中心训练神经网络。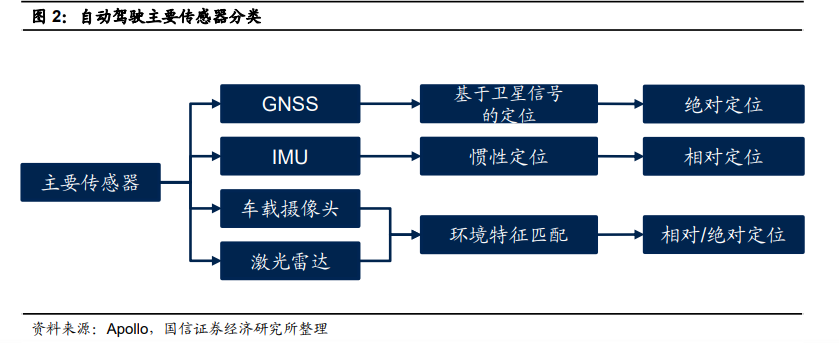 与视觉方案相比,多传感器融合的核心区别之一是激光雷达的应用。Waymo自动驾驶的单车智能技术主要以多种感知硬件设备(激光雷达为主+毫米波雷达+摄像头)、高精地图和软件算法等组成。事实上,围绕激光雷达的应用与否成为特斯拉纯视觉路线和多传感器融合路线的分歧焦点。随着激光雷达的技术、成本等不断优化,2021年以来越来越多的车型开始采用激光雷达,或作为多传感器融合路线的主要感知设备(如谷歌Waymo),或作为硬件冗余的一部分(如小鹏P5等)。
与视觉方案相比,多传感器融合的核心区别之一是激光雷达的应用。Waymo自动驾驶的单车智能技术主要以多种感知硬件设备(激光雷达为主+毫米波雷达+摄像头)、高精地图和软件算法等组成。事实上,围绕激光雷达的应用与否成为特斯拉纯视觉路线和多传感器融合路线的分歧焦点。随着激光雷达的技术、成本等不断优化,2021年以来越来越多的车型开始采用激光雷达,或作为多传感器融合路线的主要感知设备(如谷歌Waymo),或作为硬件冗余的一部分(如小鹏P5等)。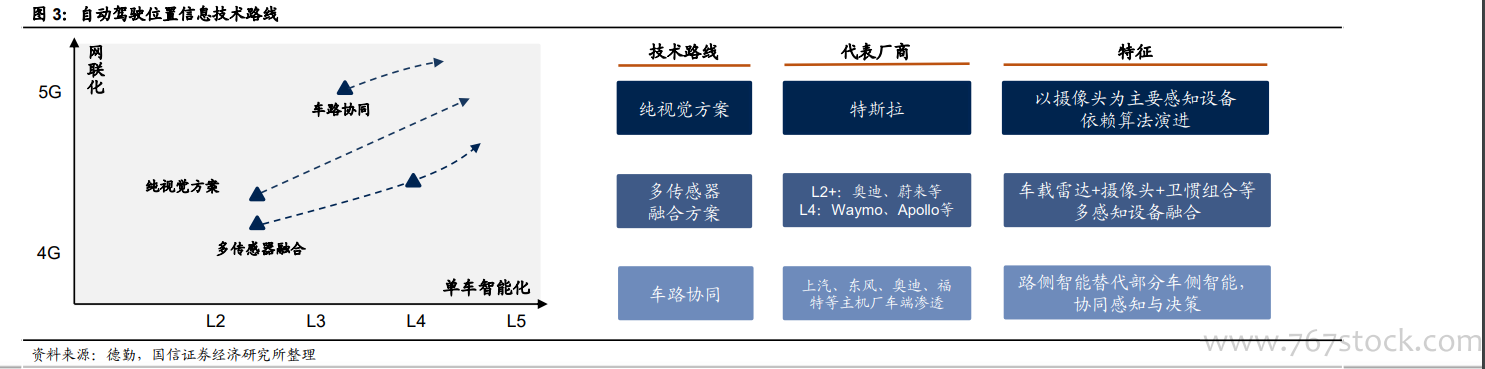
特斯拉纯视觉方案,依赖算法演进:业内纯视觉的自动驾驶方案以特斯拉为典型代表,目前特斯拉仍采用车载摄像头为主+毫米波雷达为辅的传感器配置,进一步在下一代自动驾驶套件V9上,特斯拉将移除雷达,完全采用全视觉方案。为了实现这一方案,特斯拉在深度学习算法上投入了相当大的力度,除开先前的影子模式训练(截至2020年已完成超30亿英里),进一步在特斯拉AI Day上,特斯拉公布了在神经网络、数据&数据标注、仿真等层面的持续创新,在Autopilot上进一步优化延迟问题的神经网络编辑器等改进,并发布Dojo用于在数据中心训练神经网络。
与视觉方案相比,多传感器融合的核心区别之一是激光雷达的应用。Waymo自动驾驶的单车智能技术主要以多种感知硬件设备(激光雷达为主+毫米波雷达+摄像头)、高精地图和软件算法等组成。事实上,围绕激光雷达的应用与否成为特斯拉纯视觉路线和多传感器融合路线的分歧焦点。随着激光雷达的技术、成本等不断优化,2021年以来越来越多的车型开始采用激光雷达,或作为多传感器融合路线的主要感知设备(如谷歌Waymo),或作为硬件冗余的一部分(如小鹏P5等)。



