
【行业】汽车智能化-车载计算平台产业链拆解(46页)
2022-02-15
单车 ECU 数量激增,无法满足汽车智能化的需求。1980 年代开始,以机械为主宰的汽车行业内掀起一场电子电气化革命,电子控制单元(Electronic ControlUnit,ECU)占领了整个汽车,此时的汽车电子电气架构都是分布式的,各个ECU 都通过 CAN(Controller Area Network,控制器域网络)或 LIN(LocalInterconnect Network,局部互联网络)总线连接在一起,通过工程师预设好的通信协议交换信息。在传统的 EEA 架构下,ECU 是系统的核心,智能功能的升级依赖于 ECU 数量的累加。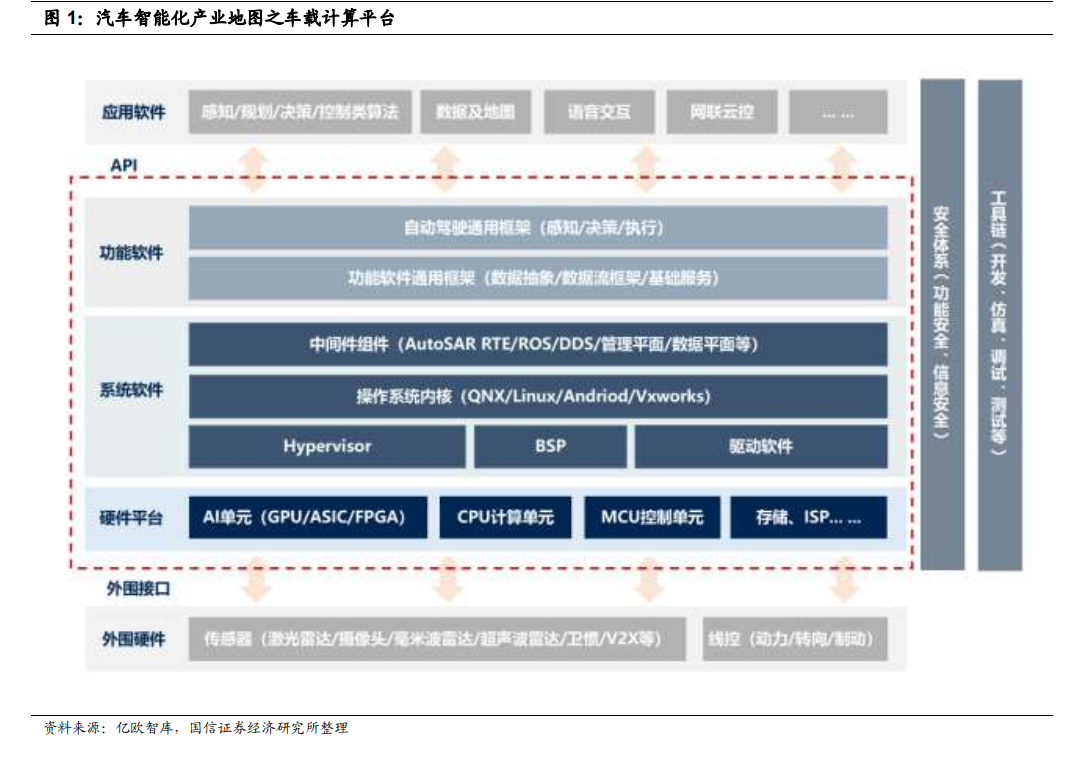 原有智能化升级方式面临研发和生产成本剧增、安全性降低、算力不足等问题,传统分布式架构亟需升级,传统 EEA 架构主要面临以下问题:(1)控制器数量过多:各级别汽车 ECU 数量都在逐年递增,每台汽车搭载的 ECU 平均 25个,一些高端车型通常会超过 100 个;(2)线束布置过于复杂:ECU 数量越多,总线数量必将更长,2000 年奔驰 S 级轿车的电子系统已经拥有 80 个 ECU,1,900 条总长达 4km 的通信总线。2007 年奥迪 Q7 和保时捷卡宴的总线长度突破 6km,重量超过 70kg,基本成为位列发动机之后的全车第二重部件;(3)“跨域”信号传输需求增加:智能驾驶需要大量的“跨域”信号传输,环境传感器(雷达,视频和激光雷达)产生了大量数据传输的需求,这也对传统分散式 ECU 基础架构提出了挑战。
原有智能化升级方式面临研发和生产成本剧增、安全性降低、算力不足等问题,传统分布式架构亟需升级,传统 EEA 架构主要面临以下问题:(1)控制器数量过多:各级别汽车 ECU 数量都在逐年递增,每台汽车搭载的 ECU 平均 25个,一些高端车型通常会超过 100 个;(2)线束布置过于复杂:ECU 数量越多,总线数量必将更长,2000 年奔驰 S 级轿车的电子系统已经拥有 80 个 ECU,1,900 条总长达 4km 的通信总线。2007 年奥迪 Q7 和保时捷卡宴的总线长度突破 6km,重量超过 70kg,基本成为位列发动机之后的全车第二重部件;(3)“跨域”信号传输需求增加:智能驾驶需要大量的“跨域”信号传输,环境传感器(雷达,视频和激光雷达)产生了大量数据传输的需求,这也对传统分散式 ECU 基础架构提出了挑战。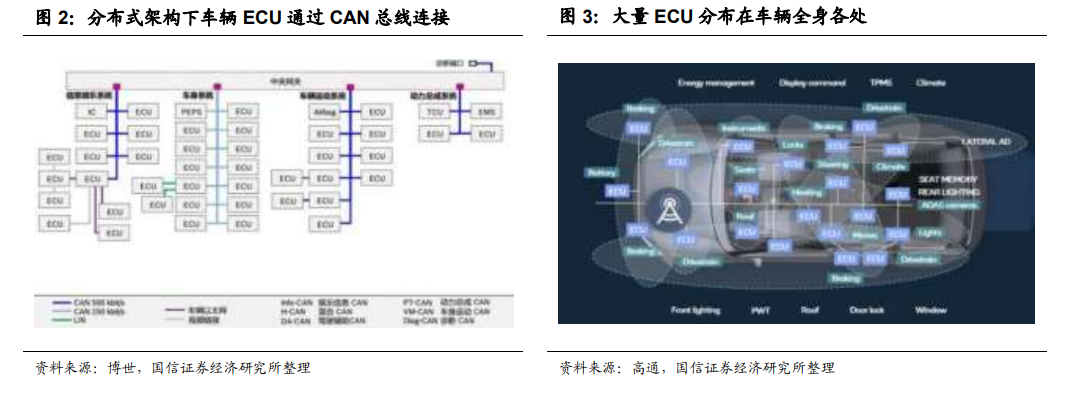 为适应智能化需求,催生出以 DCU 为主的域集中架构。为了控制总线长度、降低 ECU 数量,从而降低电子部件重量、降低整车制造成本,将分散的控制器按照功能域划分、集成为运算能力更强的域控制器(Domain Control Unit,DCU)的想法应运而生。博世用三类 EEA 架构共六个阶段来展示架构演进方向:分布式(模块化、集成化)、域集中式(集中化、域融合)、集中式(车载电脑、车-云计算)。
为适应智能化需求,催生出以 DCU 为主的域集中架构。为了控制总线长度、降低 ECU 数量,从而降低电子部件重量、降低整车制造成本,将分散的控制器按照功能域划分、集成为运算能力更强的域控制器(Domain Control Unit,DCU)的想法应运而生。博世用三类 EEA 架构共六个阶段来展示架构演进方向:分布式(模块化、集成化)、域集中式(集中化、域融合)、集中式(车载电脑、车-云计算)。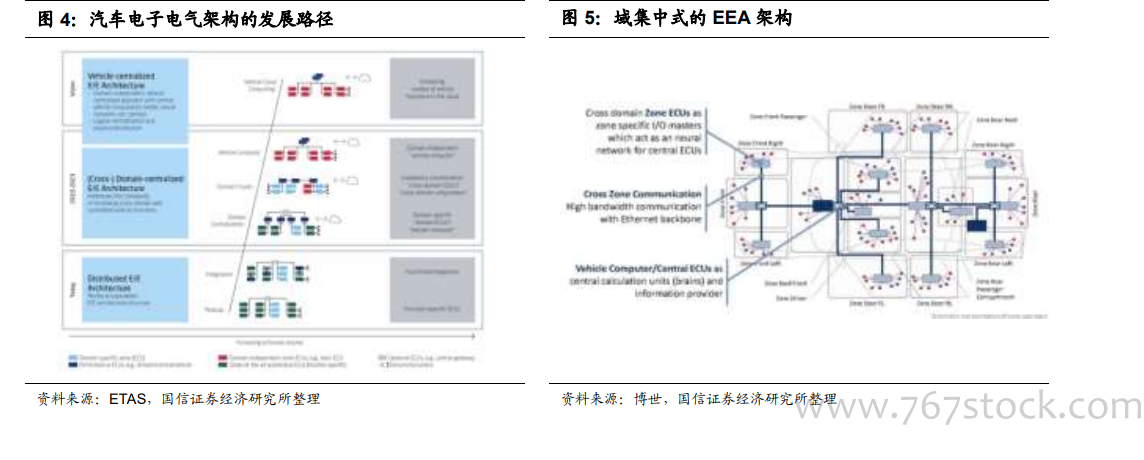
原有智能化升级方式面临研发和生产成本剧增、安全性降低、算力不足等问题,传统分布式架构亟需升级,传统 EEA 架构主要面临以下问题:(1)控制器数量过多:各级别汽车 ECU 数量都在逐年递增,每台汽车搭载的 ECU 平均 25个,一些高端车型通常会超过 100 个;(2)线束布置过于复杂:ECU 数量越多,总线数量必将更长,2000 年奔驰 S 级轿车的电子系统已经拥有 80 个 ECU,1,900 条总长达 4km 的通信总线。2007 年奥迪 Q7 和保时捷卡宴的总线长度突破 6km,重量超过 70kg,基本成为位列发动机之后的全车第二重部件;(3)“跨域”信号传输需求增加:智能驾驶需要大量的“跨域”信号传输,环境传感器(雷达,视频和激光雷达)产生了大量数据传输的需求,这也对传统分散式 ECU 基础架构提出了挑战。
为适应智能化需求,催生出以 DCU 为主的域集中架构。为了控制总线长度、降低 ECU 数量,从而降低电子部件重量、降低整车制造成本,将分散的控制器按照功能域划分、集成为运算能力更强的域控制器(Domain Control Unit,DCU)的想法应运而生。博世用三类 EEA 架构共六个阶段来展示架构演进方向:分布式(模块化、集成化)、域集中式(集中化、域融合)、集中式(车载电脑、车-云计算)。



