
【行业】电子-激光雷达商用元年投资价值凸显(38页)
2022-04-28
自动驾驶主要分为 L0-L5 五个级别,L3 级以上提升对系统感知的要求。国际自动机械工程师学会(SAE)将自动驾驶分为 L0-L5 五个级别,其中系统在L1-L3 级阶段主要起辅助作用。从 L2 级升至 L3 级,车辆的操作控制对象发生了主要变化,L2 级及以下仍旧由驾驶员负责环境的感知;L3 级及以上则由系统负责环境的感知和系统全部动态驾驶任务,驾驶员不需要一直对方向盘进行掌控,仅需在特殊情况发生时对系统提出的干预请求进行回应。当自动驾驶级别上升至 L4级车辆驾驶便全由系统负责, L5 与 L4 的区别在于是在特定场景还是全场景的应用。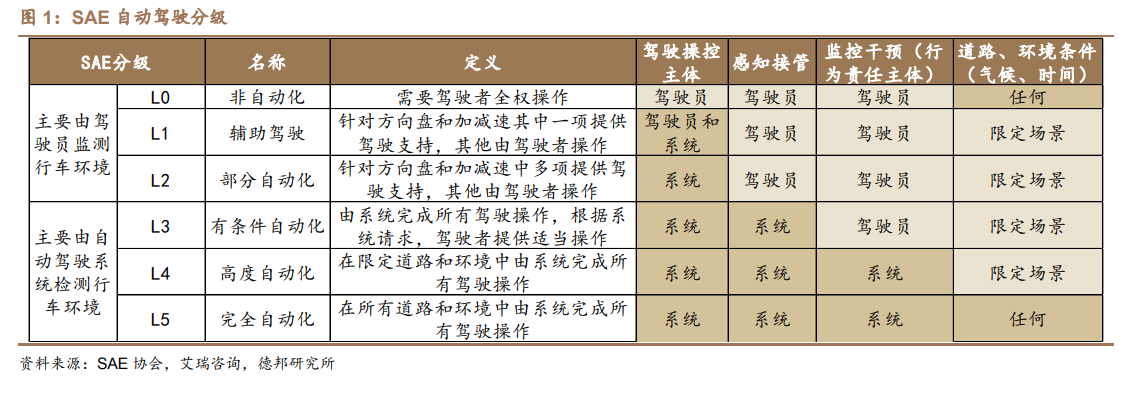 自动驾驶可以分为感知层、决策层、执行层,其中感知器主要包括车辆运动、环境感知两大类。车辆运动传感器为车辆运行过程中相关速度、角度提供全姿态的信息参数和高精度的定位信息,环境感知传感器主要由激光雷达、毫米波雷达、超声波雷达、摄像头等组成,将感知的数据融合提供给决策处理层,决策层通过中央处理系统、芯片、算法等将接收到的数据进行处理,最终输出相应的操作与指令任务给执行层,执行层则负责对此完成相应的动力供给、方向控制、车灯控制等动作。
自动驾驶可以分为感知层、决策层、执行层,其中感知器主要包括车辆运动、环境感知两大类。车辆运动传感器为车辆运行过程中相关速度、角度提供全姿态的信息参数和高精度的定位信息,环境感知传感器主要由激光雷达、毫米波雷达、超声波雷达、摄像头等组成,将感知的数据融合提供给决策处理层,决策层通过中央处理系统、芯片、算法等将接收到的数据进行处理,最终输出相应的操作与指令任务给执行层,执行层则负责对此完成相应的动力供给、方向控制、车灯控制等动作。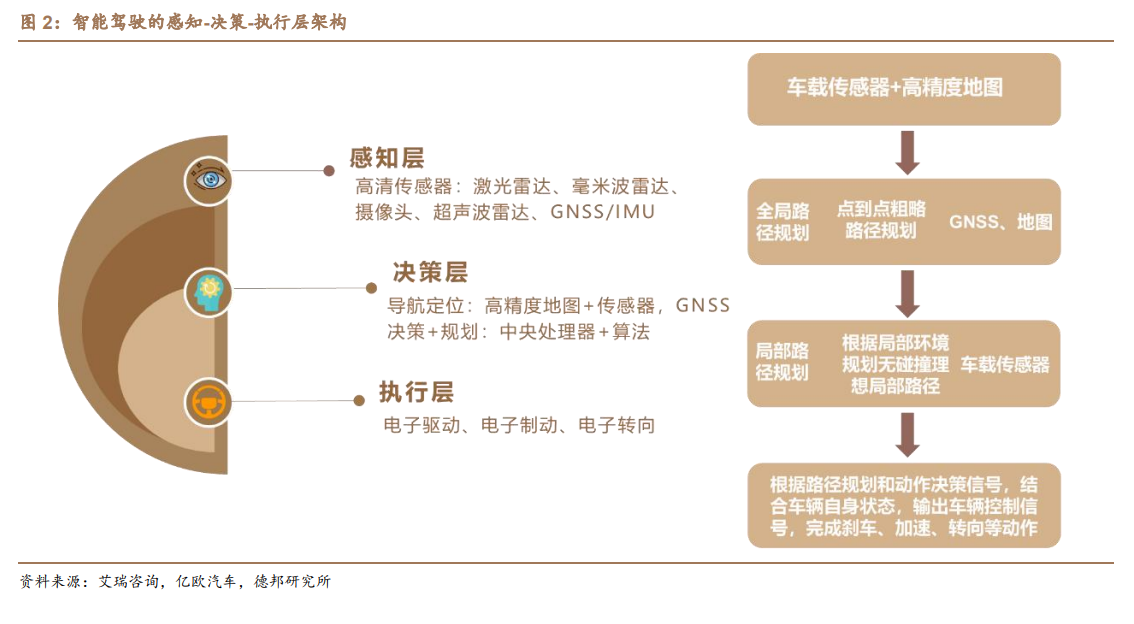 纯视觉路线以摄像头为主导,由于摄像头精确度较低,所以一般对于算法和计算能力的要求更高。特斯拉通过“D1 人工智能芯片+Dojo 超级计算机群+无监督学习算法”打造纯视觉路线的底层支撑,D1 芯片作为 Dojo 超级计算机系统的一部分,可以将摄像头内收集到的视频数据进行无监督学习算法的模型训练,减少人工标注的工作量。摄像头成本较低,但劣势在于摄像头在黑暗环境中精度有所下降,因此对数据样本库的容量和模型的精度要求较高。超声波雷达、毫米波雷达、激光雷达等雷达类测距传感器融合方案精确度更高,但是由于技术尚未完全成熟,量产的成本高昂。
纯视觉路线以摄像头为主导,由于摄像头精确度较低,所以一般对于算法和计算能力的要求更高。特斯拉通过“D1 人工智能芯片+Dojo 超级计算机群+无监督学习算法”打造纯视觉路线的底层支撑,D1 芯片作为 Dojo 超级计算机系统的一部分,可以将摄像头内收集到的视频数据进行无监督学习算法的模型训练,减少人工标注的工作量。摄像头成本较低,但劣势在于摄像头在黑暗环境中精度有所下降,因此对数据样本库的容量和模型的精度要求较高。超声波雷达、毫米波雷达、激光雷达等雷达类测距传感器融合方案精确度更高,但是由于技术尚未完全成熟,量产的成本高昂。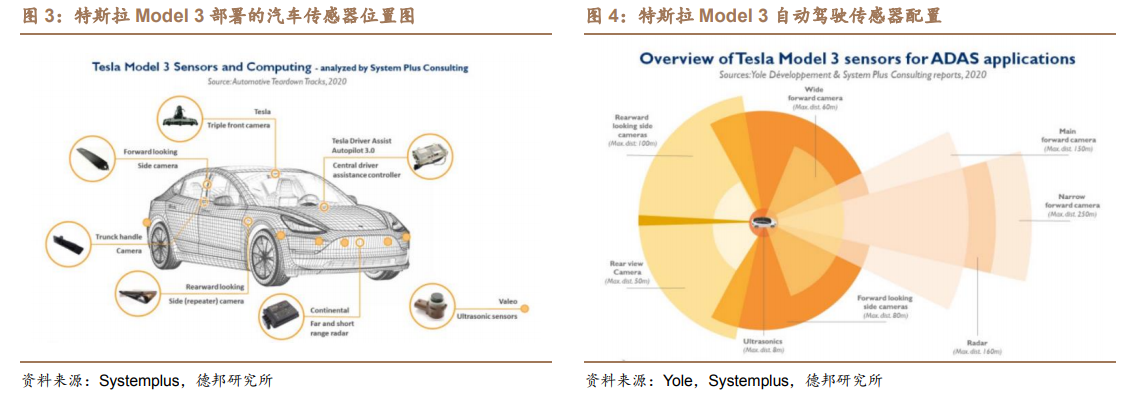
自动驾驶可以分为感知层、决策层、执行层,其中感知器主要包括车辆运动、环境感知两大类。车辆运动传感器为车辆运行过程中相关速度、角度提供全姿态的信息参数和高精度的定位信息,环境感知传感器主要由激光雷达、毫米波雷达、超声波雷达、摄像头等组成,将感知的数据融合提供给决策处理层,决策层通过中央处理系统、芯片、算法等将接收到的数据进行处理,最终输出相应的操作与指令任务给执行层,执行层则负责对此完成相应的动力供给、方向控制、车灯控制等动作。
纯视觉路线以摄像头为主导,由于摄像头精确度较低,所以一般对于算法和计算能力的要求更高。特斯拉通过“D1 人工智能芯片+Dojo 超级计算机群+无监督学习算法”打造纯视觉路线的底层支撑,D1 芯片作为 Dojo 超级计算机系统的一部分,可以将摄像头内收集到的视频数据进行无监督学习算法的模型训练,减少人工标注的工作量。摄像头成本较低,但劣势在于摄像头在黑暗环境中精度有所下降,因此对数据样本库的容量和模型的精度要求较高。超声波雷达、毫米波雷达、激光雷达等雷达类测距传感器融合方案精确度更高,但是由于技术尚未完全成熟,量产的成本高昂。



