
【行业】通信-组合导航迎自动驾驶大时代(26页)
2022-08-19
GNSS 与 IMU 融合可提供稳定的绝对位置信息。全球卫星导航系统(GNSS)是能为地球表面或近地空间任何地点提供全天候定位、导航、授时的空基无线电导航定位系统。美国的全球定位系统(GPS)、俄罗斯的格洛纳斯卫星导航系统(GLONASS)、欧盟的伽利略卫星导航系统(Galileo)以及我国的北斗卫星导航系统(BDS)是全球四大卫星导航定位系统。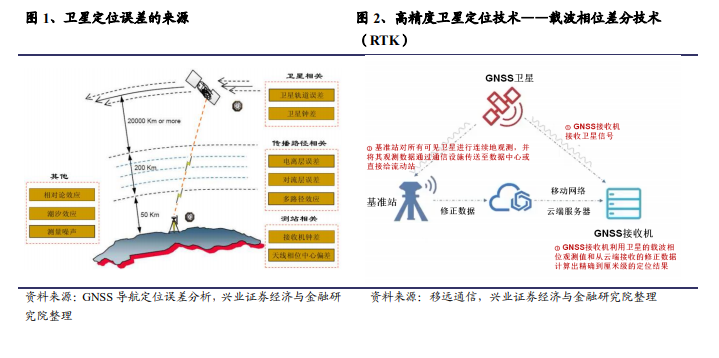 惯性导航系统(INS)属于推算导航方式,即从一已知点的位置根据连续测得的运动体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。惯性导航系统的核心部件为陀螺仪和加速度计,利用载体先前的位置、惯性传感器测量的加速度和角速度来确定其当前位置。给定初始条件,加速度经过一次积分得到速度,经过二次积分得到位移。角速度经过处理可以得出车辆的俯仰、偏航、滚转等姿态信息,利用姿态信息可以把导航参数从载体坐标系变换到当地水平坐标系中。
惯性导航系统(INS)属于推算导航方式,即从一已知点的位置根据连续测得的运动体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。惯性导航系统的核心部件为陀螺仪和加速度计,利用载体先前的位置、惯性传感器测量的加速度和角速度来确定其当前位置。给定初始条件,加速度经过一次积分得到速度,经过二次积分得到位移。角速度经过处理可以得出车辆的俯仰、偏航、滚转等姿态信息,利用姿态信息可以把导航参数从载体坐标系变换到当地水平坐标系中。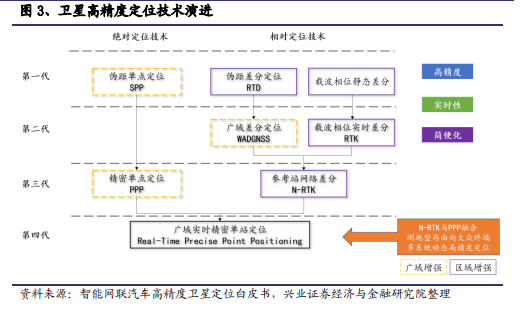 汽车电子电气架构正逐步由分布式 ECU 向域控制器、中央集中架构方向发展。高精度定位模块在汽车中的搭载方案主要为以下两种:①高精度卫星定位模块挂接到中央网关。高精度定位模块包括卫星定位信号接入、RTK 信息接入、IMU、融合定位算法、高精度地图单元等。该方案需要将高精度定位及高精度地图信息通过车内网络传输到自动驾驶域控制器,加大了时间延迟,降低了高精度定位的精度。
汽车电子电气架构正逐步由分布式 ECU 向域控制器、中央集中架构方向发展。高精度定位模块在汽车中的搭载方案主要为以下两种:①高精度卫星定位模块挂接到中央网关。高精度定位模块包括卫星定位信号接入、RTK 信息接入、IMU、融合定位算法、高精度地图单元等。该方案需要将高精度定位及高精度地图信息通过车内网络传输到自动驾驶域控制器,加大了时间延迟,降低了高精度定位的精度。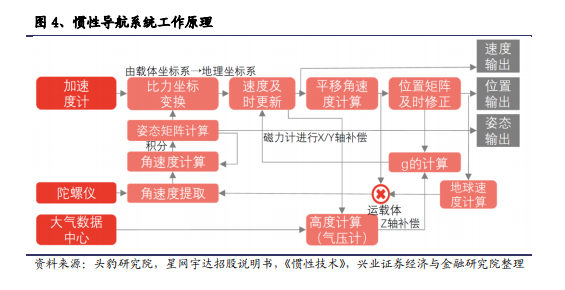
惯性导航系统(INS)属于推算导航方式,即从一已知点的位置根据连续测得的运动体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。惯性导航系统的核心部件为陀螺仪和加速度计,利用载体先前的位置、惯性传感器测量的加速度和角速度来确定其当前位置。给定初始条件,加速度经过一次积分得到速度,经过二次积分得到位移。角速度经过处理可以得出车辆的俯仰、偏航、滚转等姿态信息,利用姿态信息可以把导航参数从载体坐标系变换到当地水平坐标系中。
汽车电子电气架构正逐步由分布式 ECU 向域控制器、中央集中架构方向发展。高精度定位模块在汽车中的搭载方案主要为以下两种:①高精度卫星定位模块挂接到中央网关。高精度定位模块包括卫星定位信号接入、RTK 信息接入、IMU、融合定位算法、高精度地图单元等。该方案需要将高精度定位及高精度地图信息通过车内网络传输到自动驾驶域控制器,加大了时间延迟,降低了高精度定位的精度。



