
【行业】机器人专题系列-电机驱动勇立潮头(15页)
2022-09-14
机器人电机须符合的主要要求。机器人关节的运转对驱动电机提出了较高要求,在灵活度上,要求其有最大功率质量比和扭矩惯量比、高起动转矩、低惯量;在性能上,伺服电动机须有较高的可靠性、稳定性,同时需能快速响应,具有较高的可靠性和稳定性;在动作上,能够控制特性的连续性和直线性;在速度上,要求较宽广且平滑的调速范围;在形态上,体积小、质量小、轴向尺寸短,且能经受得起苛刻的运行条件。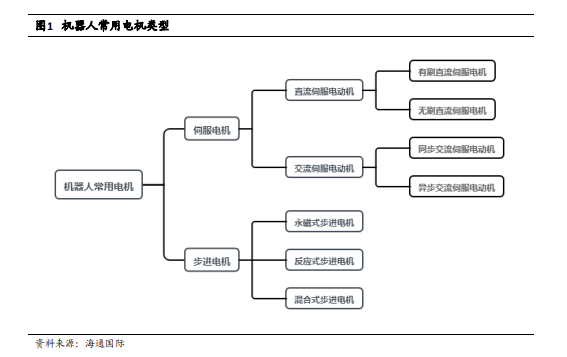 直流伺服电动机。直流伺服电动机,分为有刷直流伺服电机和无刷直流伺服电机。有刷直流伺服电机,优点是成本低,结构简单,启动转矩大,速度调节范围宽,控制容易,维护方便。缺点是会产生电磁干扰,对环境有要求。无刷直流伺服电机,具备体积小,重量轻,出力大,转动平滑,力矩稳定,高速且灵敏等优势,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,不存在碳刷损耗的情况,效率很高,运行温度低,不易产生火花,噪音小,电磁辐射小,寿命相对较长。
直流伺服电动机。直流伺服电动机,分为有刷直流伺服电机和无刷直流伺服电机。有刷直流伺服电机,优点是成本低,结构简单,启动转矩大,速度调节范围宽,控制容易,维护方便。缺点是会产生电磁干扰,对环境有要求。无刷直流伺服电机,具备体积小,重量轻,出力大,转动平滑,力矩稳定,高速且灵敏等优势,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,不存在碳刷损耗的情况,效率很高,运行温度低,不易产生火花,噪音小,电磁辐射小,寿命相对较长。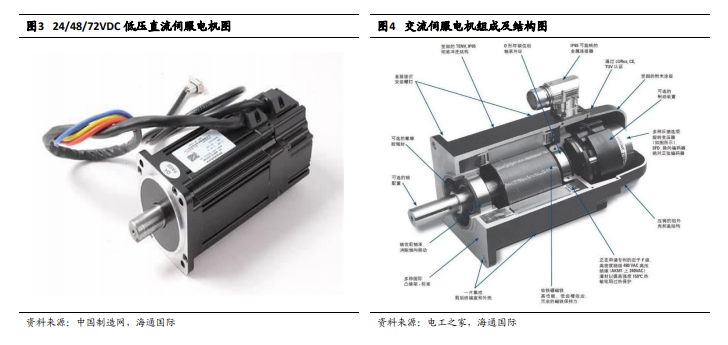 优必选 Walker X 机器人。Walker X 高度模仿人的身体结构,身高 1.3 米,体重 63 公斤,41 个高性能伺服驱动关节,面部 160°环绕 4.6K 高清双柔性曲面屏。整体外部光滑圆润,没有明显的棱角,关节部位没有外露的机械限位结构,非常符合其家庭服务的定位。此外,WalkerX 具备开放、灵活、丰富、便捷的 AloT 接口,能够依据用户习惯和场景,自主控制灯光、冰箱等常见的 AloT 设备,全方位满足智能家具场景的应用。
优必选 Walker X 机器人。Walker X 高度模仿人的身体结构,身高 1.3 米,体重 63 公斤,41 个高性能伺服驱动关节,面部 160°环绕 4.6K 高清双柔性曲面屏。整体外部光滑圆润,没有明显的棱角,关节部位没有外露的机械限位结构,非常符合其家庭服务的定位。此外,WalkerX 具备开放、灵活、丰富、便捷的 AloT 接口,能够依据用户习惯和场景,自主控制灯光、冰箱等常见的 AloT 设备,全方位满足智能家具场景的应用。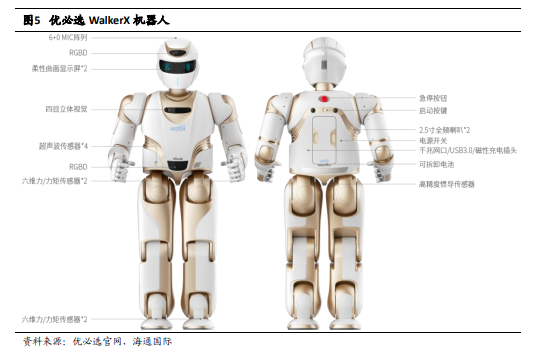
直流伺服电动机。直流伺服电动机,分为有刷直流伺服电机和无刷直流伺服电机。有刷直流伺服电机,优点是成本低,结构简单,启动转矩大,速度调节范围宽,控制容易,维护方便。缺点是会产生电磁干扰,对环境有要求。无刷直流伺服电机,具备体积小,重量轻,出力大,转动平滑,力矩稳定,高速且灵敏等优势,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,不存在碳刷损耗的情况,效率很高,运行温度低,不易产生火花,噪音小,电磁辐射小,寿命相对较长。
优必选 Walker X 机器人。Walker X 高度模仿人的身体结构,身高 1.3 米,体重 63 公斤,41 个高性能伺服驱动关节,面部 160°环绕 4.6K 高清双柔性曲面屏。整体外部光滑圆润,没有明显的棱角,关节部位没有外露的机械限位结构,非常符合其家庭服务的定位。此外,WalkerX 具备开放、灵活、丰富、便捷的 AloT 接口,能够依据用户习惯和场景,自主控制灯光、冰箱等常见的 AloT 设备,全方位满足智能家具场景的应用。



