
【行业】对比Atlas看人形机器人商业化(25页)
2022-11-01
人形机器人的步态及平衡控制具有较高技术难度。人形机器人在移动时只受自身重力和地面作用力两方面外力,但机器人只能通过控制关节驱动力来控制步态,带来了研发的极大难度。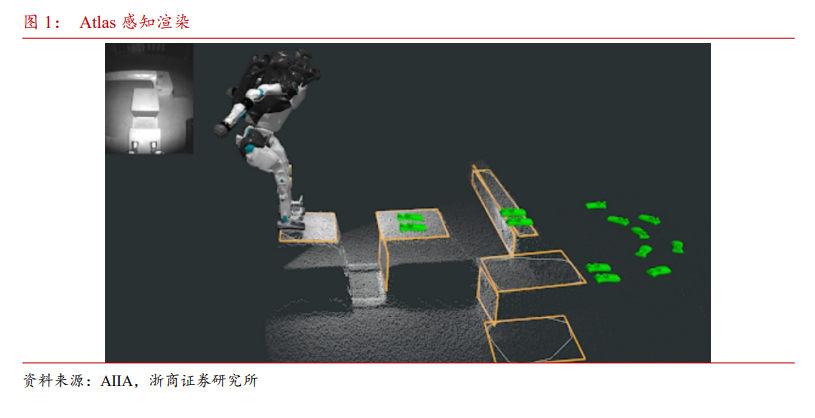 TOF(Time of Flight)深度相机,增加了像素 Z 轴的景深信息,也被称为 3D TOF。给目标发送连续光脉冲,通过传感器接收物体反射光,计算发射和反射时间差或相位差,来换算目标距离以及深度信息,再结合传统相机拍摄,以不同颜色代表不同距离的地形图方式呈现目标的三维轮廓。
TOF(Time of Flight)深度相机,增加了像素 Z 轴的景深信息,也被称为 3D TOF。给目标发送连续光脉冲,通过传感器接收物体反射光,计算发射和反射时间差或相位差,来换算目标距离以及深度信息,再结合传统相机拍摄,以不同颜色代表不同距离的地形图方式呈现目标的三维轮廓。 特斯拉人形机器人感知视觉技术为自动驾驶纯视觉系统的迁移,发展相对成熟,具商业化规模成本优势。特斯拉视觉模块采用处理原始信息的神经网络,即纯视觉系统。借鉴Google Transformer 模型,搭建 HydraNet 神经网络模型,优化视觉算法。它获取密集的视频数据,将其压缩到 3D 向量空间。实时处理摄像头传输的图像,转换为向量信息。形成所需要的全部三维空间信息,包括线条、边缘、路沿、交通指示、交通灯、位置、方向、深度、速度等。
特斯拉人形机器人感知视觉技术为自动驾驶纯视觉系统的迁移,发展相对成熟,具商业化规模成本优势。特斯拉视觉模块采用处理原始信息的神经网络,即纯视觉系统。借鉴Google Transformer 模型,搭建 HydraNet 神经网络模型,优化视觉算法。它获取密集的视频数据,将其压缩到 3D 向量空间。实时处理摄像头传输的图像,转换为向量信息。形成所需要的全部三维空间信息,包括线条、边缘、路沿、交通指示、交通灯、位置、方向、深度、速度等。
TOF(Time of Flight)深度相机,增加了像素 Z 轴的景深信息,也被称为 3D TOF。给目标发送连续光脉冲,通过传感器接收物体反射光,计算发射和反射时间差或相位差,来换算目标距离以及深度信息,再结合传统相机拍摄,以不同颜色代表不同距离的地形图方式呈现目标的三维轮廓。
特斯拉人形机器人感知视觉技术为自动驾驶纯视觉系统的迁移,发展相对成熟,具商业化规模成本优势。特斯拉视觉模块采用处理原始信息的神经网络,即纯视觉系统。借鉴Google Transformer 模型,搭建 HydraNet 神经网络模型,优化视觉算法。它获取密集的视频数据,将其压缩到 3D 向量空间。实时处理摄像头传输的图像,转换为向量信息。形成所需要的全部三维空间信息,包括线条、边缘、路沿、交通指示、交通灯、位置、方向、深度、速度等。



