
【行业】扫地机器人感知模块-LDS与VSLAM(20页)
2018-07-03
扫地机器人智能化升级,感知模块重要性突出。扫地机器人最早在欧美市场销售,近年来随着深度学习、机器视觉等AI技术的发展,扫地机器人产品的迭代不断加快,向智能化方向升级。目前,市场主流机型可分为随机式清扫(第一代)、规划式清扫(第二代)和导航建图式清扫(第三代),后两代都具备路径规划技术,这使得环境感知模块的重要性愈发突出。智能扫地机器人以自动清扫的方式解放年轻人打扫压力,同时其智能化特性引发年轻人的“猎奇”心理,使得市场规模高速增长。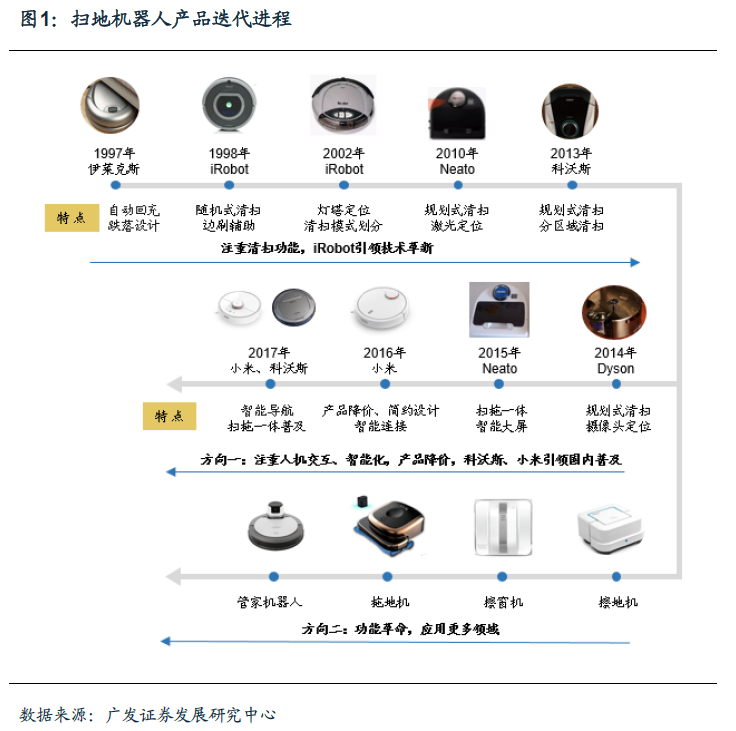 LDS 方案 :技术成熟 ,降低成本是关键 降低成本是关键 降低成本是关键 降低成本是关键。激光雷达SLAM是LDS激光测距传感器与SLAM技术的结合。激光雷达测距LDS的原理是:从半导体激光器以一定的入射角度发射一束或n束激光照射被测物体,激光在物体表面发生散射或折射,通过透镜对反射激光汇聚成像,光斑成像在CCD传感器上(Charge-coupled Device,感光耦合组件)。当物体发生位移时,光斑也将随之产生移动,其位移大小通过信号处理器的计算而获得,由光斑位移距离计算出被测物体与基线的距离值。由于入射光和反射光构成一个三角形,位移计算运用了几何三角定理,故又被称为激光三角测距法。这种方法能够获得精度较高的距离信息。
LDS 方案 :技术成熟 ,降低成本是关键 降低成本是关键 降低成本是关键 降低成本是关键。激光雷达SLAM是LDS激光测距传感器与SLAM技术的结合。激光雷达测距LDS的原理是:从半导体激光器以一定的入射角度发射一束或n束激光照射被测物体,激光在物体表面发生散射或折射,通过透镜对反射激光汇聚成像,光斑成像在CCD传感器上(Charge-coupled Device,感光耦合组件)。当物体发生位移时,光斑也将随之产生移动,其位移大小通过信号处理器的计算而获得,由光斑位移距离计算出被测物体与基线的距离值。由于入射光和反射光构成一个三角形,位移计算运用了几何三角定理,故又被称为激光三角测距法。这种方法能够获得精度较高的距离信息。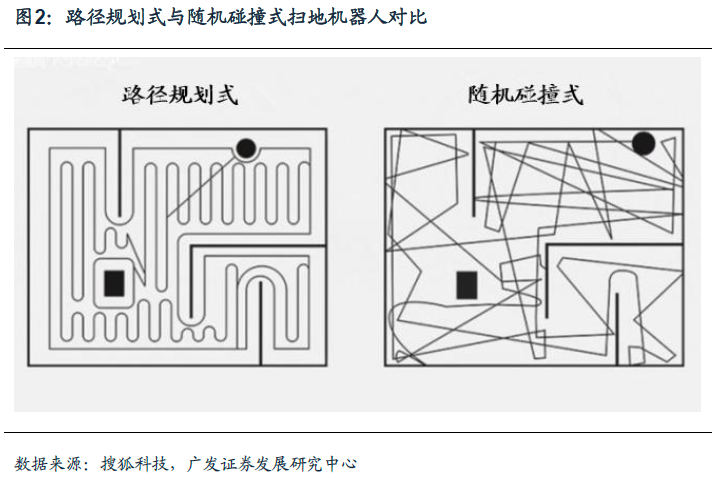 影响LDS价格的主要有两大要素:线束数量和采购量。通常线束越高,价格越高;采购量越大,价格越低。Quanergy公司通过降低线束维度,逐步使用固态激光雷达,让成本降低到了250美元左右,国内企业思岚科技,可以在采购量超过1万台左右时,单线束的价格可以降低到1000元以内。随着终端用户的产品放量,激光雷达的产业化将会带动价格打破瓶颈区域。
影响LDS价格的主要有两大要素:线束数量和采购量。通常线束越高,价格越高;采购量越大,价格越低。Quanergy公司通过降低线束维度,逐步使用固态激光雷达,让成本降低到了250美元左右,国内企业思岚科技,可以在采购量超过1万台左右时,单线束的价格可以降低到1000元以内。随着终端用户的产品放量,激光雷达的产业化将会带动价格打破瓶颈区域。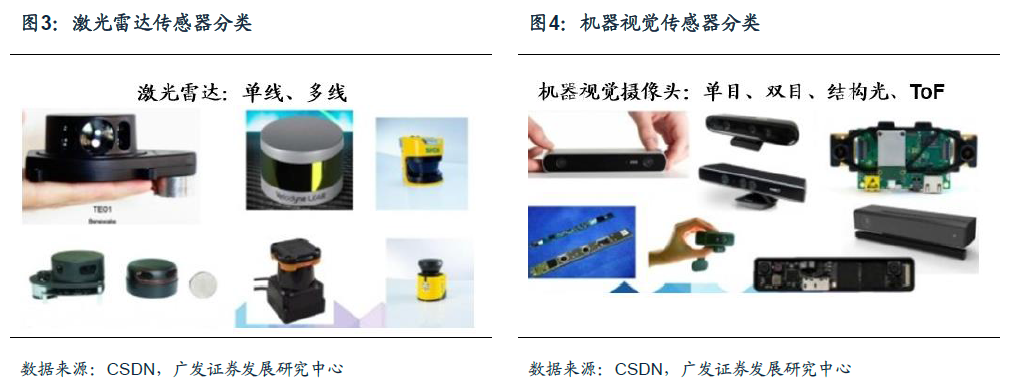 相比之下,对空间测距范围需求有限的扫地机器人大多采用1线短距离LDS,相对较低的成本也有利于LDS在该领域的推广。目前来看,新一代扫地机器人已经开始利用LDS技术替换传统随机碰撞式产品,例如小米和Neato的扫地机器人主要走LDS方向,而科沃斯产品则覆盖了LDS与VSLAM技术。以小米为例,2016年公布的米家扫地机器人,搭载了小米自主研发的LDS传感器,可以实现360°扫描,测距达到了1800次/秒。该产品会根据LDS获取的精确距离信息,通过SLAM算法实时绘制房间地图,提高清扫效率和质量。
相比之下,对空间测距范围需求有限的扫地机器人大多采用1线短距离LDS,相对较低的成本也有利于LDS在该领域的推广。目前来看,新一代扫地机器人已经开始利用LDS技术替换传统随机碰撞式产品,例如小米和Neato的扫地机器人主要走LDS方向,而科沃斯产品则覆盖了LDS与VSLAM技术。以小米为例,2016年公布的米家扫地机器人,搭载了小米自主研发的LDS传感器,可以实现360°扫描,测距达到了1800次/秒。该产品会根据LDS获取的精确距离信息,通过SLAM算法实时绘制房间地图,提高清扫效率和质量。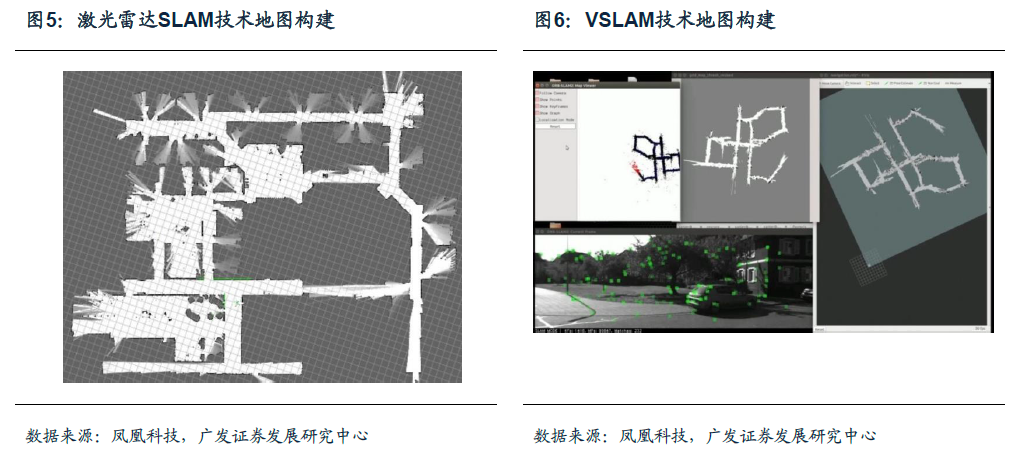 因此VSLAM的稳健性是一个有挑战的问题。为此需要引入回环检测,就是如何有效判断相机经过同一场景的能力。如果回环成功,通过把对比信息输送给后端优化,提供更加有效的姿态约束,从而显著减小累积误差,逼近全局一致。
因此VSLAM的稳健性是一个有挑战的问题。为此需要引入回环检测,就是如何有效判断相机经过同一场景的能力。如果回环成功,通过把对比信息输送给后端优化,提供更加有效的姿态约束,从而显著减小累积误差,逼近全局一致。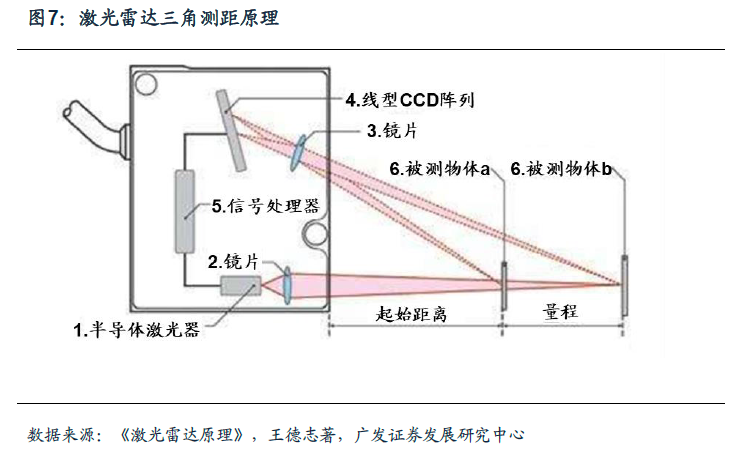
LDS 方案 :技术成熟 ,降低成本是关键 降低成本是关键 降低成本是关键 降低成本是关键。激光雷达SLAM是LDS激光测距传感器与SLAM技术的结合。激光雷达测距LDS的原理是:从半导体激光器以一定的入射角度发射一束或n束激光照射被测物体,激光在物体表面发生散射或折射,通过透镜对反射激光汇聚成像,光斑成像在CCD传感器上(Charge-coupled Device,感光耦合组件)。当物体发生位移时,光斑也将随之产生移动,其位移大小通过信号处理器的计算而获得,由光斑位移距离计算出被测物体与基线的距离值。由于入射光和反射光构成一个三角形,位移计算运用了几何三角定理,故又被称为激光三角测距法。这种方法能够获得精度较高的距离信息。
影响LDS价格的主要有两大要素:线束数量和采购量。通常线束越高,价格越高;采购量越大,价格越低。Quanergy公司通过降低线束维度,逐步使用固态激光雷达,让成本降低到了250美元左右,国内企业思岚科技,可以在采购量超过1万台左右时,单线束的价格可以降低到1000元以内。随着终端用户的产品放量,激光雷达的产业化将会带动价格打破瓶颈区域。
相比之下,对空间测距范围需求有限的扫地机器人大多采用1线短距离LDS,相对较低的成本也有利于LDS在该领域的推广。目前来看,新一代扫地机器人已经开始利用LDS技术替换传统随机碰撞式产品,例如小米和Neato的扫地机器人主要走LDS方向,而科沃斯产品则覆盖了LDS与VSLAM技术。以小米为例,2016年公布的米家扫地机器人,搭载了小米自主研发的LDS传感器,可以实现360°扫描,测距达到了1800次/秒。该产品会根据LDS获取的精确距离信息,通过SLAM算法实时绘制房间地图,提高清扫效率和质量。
因此VSLAM的稳健性是一个有挑战的问题。为此需要引入回环检测,就是如何有效判断相机经过同一场景的能力。如果回环成功,通过把对比信息输送给后端优化,提供更加有效的姿态约束,从而显著减小累积误差,逼近全局一致。



