
【行业】汽车电子感知-多传感器融合之路开启(42页)
2021-05-26
多传感器配置保证系统冗余:根据工信部《汽车驾驶自动化分级》,可将自动驾驶分为L0-L5 六个等级。在等级要求上:L0-L1 驾驶员参与对车辆横向和纵向控制,L0-L2 驾驶员完成目标和事件探测与响应。到了 L3 阶段,在特定驾驶模式下由自动驾驶系统完成所有的动态驾驶任务,但期望人类驾驶员能正确响应请求并接管操控。在功能实现上:L1 主要实现自适应巡航、自动紧急刹车、车道保持、泊车辅助等功能,L2 能完成车道内自动驾驶、换道辅助和自动泊车;而 L3 可以进行有条件的自动驾驶如高速自动驾驶,城郊公路驾驶等;L4-L5 最终实现车路协同,达到城市内自动驾驶。在硬件配置要求上:自动驾驶程度的递进,需要多传感器的融合,对摄像头、超声波雷达、毫米波雷达、激光雷达等感知层硬件的性能和数量提出更高的要求。 多传感器融合的感知系统可以形成互补,有效应对现实世界中的光照,天气,路况各种复杂条件,以及再安全方面形成冗余设计。激光雷达对于距离的探测很强,也具备一定的全天候工作能力,在 3D 成像和高精度地图定位方面具备优势。摄像头的采样率和分辨率很高,对于纹理信息获取能力强,但是受到天气的影响太大。相比于摄像头和激光雷达,毫米波雷达的优势在于全天候工作特性,受不良天气影响弱,测速、测距能力强。超声波雷达主要适用于近距离感知,具备成本低车规级量产容易等优势。
多传感器融合的感知系统可以形成互补,有效应对现实世界中的光照,天气,路况各种复杂条件,以及再安全方面形成冗余设计。激光雷达对于距离的探测很强,也具备一定的全天候工作能力,在 3D 成像和高精度地图定位方面具备优势。摄像头的采样率和分辨率很高,对于纹理信息获取能力强,但是受到天气的影响太大。相比于摄像头和激光雷达,毫米波雷达的优势在于全天候工作特性,受不良天气影响弱,测速、测距能力强。超声波雷达主要适用于近距离感知,具备成本低车规级量产容易等优势。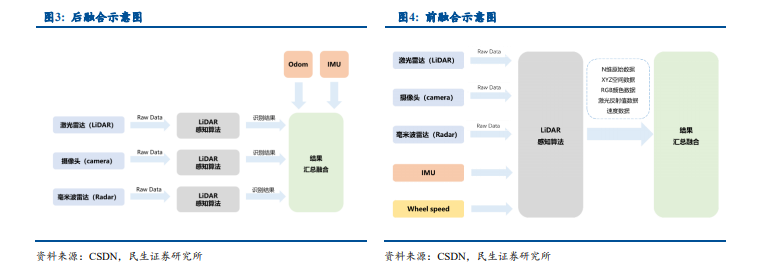 前融合是未来趋势,最终实现软硬件解耦。传感器融合分成两种:前融合和后融合。后融合算法下,每个传感器各自独立处理生成目标数据,再由主处理器进行数据融合。而前融合只有一个感知算法,在原始层把各种传感器的数据融合在一起,实现原始数据的同步,即空间同步和时间同步。相较于后融合,前融合的优势在于:1)前融合将所有传感器的原始数据进行统一算法处理,降低了整个感知架构的复杂度和系统延迟;2)许多后融合感知中被过滤掉的无效和无用的信息,在前感知路线中通过与其他传感器数据融合后进行综合识别,可以创建出一个更全面、更完整的环境感知信息,大大提高感知系统的稳健性。
前融合是未来趋势,最终实现软硬件解耦。传感器融合分成两种:前融合和后融合。后融合算法下,每个传感器各自独立处理生成目标数据,再由主处理器进行数据融合。而前融合只有一个感知算法,在原始层把各种传感器的数据融合在一起,实现原始数据的同步,即空间同步和时间同步。相较于后融合,前融合的优势在于:1)前融合将所有传感器的原始数据进行统一算法处理,降低了整个感知架构的复杂度和系统延迟;2)许多后融合感知中被过滤掉的无效和无用的信息,在前感知路线中通过与其他传感器数据融合后进行综合识别,可以创建出一个更全面、更完整的环境感知信息,大大提高感知系统的稳健性。
多传感器融合的感知系统可以形成互补,有效应对现实世界中的光照,天气,路况各种复杂条件,以及再安全方面形成冗余设计。激光雷达对于距离的探测很强,也具备一定的全天候工作能力,在 3D 成像和高精度地图定位方面具备优势。摄像头的采样率和分辨率很高,对于纹理信息获取能力强,但是受到天气的影响太大。相比于摄像头和激光雷达,毫米波雷达的优势在于全天候工作特性,受不良天气影响弱,测速、测距能力强。超声波雷达主要适用于近距离感知,具备成本低车规级量产容易等优势。
前融合是未来趋势,最终实现软硬件解耦。传感器融合分成两种:前融合和后融合。后融合算法下,每个传感器各自独立处理生成目标数据,再由主处理器进行数据融合。而前融合只有一个感知算法,在原始层把各种传感器的数据融合在一起,实现原始数据的同步,即空间同步和时间同步。相较于后融合,前融合的优势在于:1)前融合将所有传感器的原始数据进行统一算法处理,降低了整个感知架构的复杂度和系统延迟;2)许多后融合感知中被过滤掉的无效和无用的信息,在前感知路线中通过与其他传感器数据融合后进行综合识别,可以创建出一个更全面、更完整的环境感知信息,大大提高感知系统的稳健性。



