
【行业】汽车智能化-车载计算平台赛道玩家梳理(50页)
2022-03-05
特斯拉于 2014 年推出自动驾驶辅助系统 Autopilot 1.0,特斯拉掌握核心数据、AI 算法以及主控芯片,从硬到软的全栈自研,这也成为了特斯拉最核心的竞争壁。特斯拉成立于 2003 年,并于 2010 年在纳斯达克上市。2008 年至 2020年特斯拉共发布 Model S、Model X、Model 3、Model Y 四款量产车型。特斯拉于 2013 年开始自动驾驶辅助系统的研发,并于 2014 年特斯拉推出自动驾驶辅助系统 Autopilot 1.0,此后经历四次升级,并在 2019 年在 HW 3.0 平台上推出了自研的 FSD(Full Self-Driving Computer)主控芯片。 特斯拉从 Mobileye 到英伟达,最终走向 FSD 自研芯片。特斯拉从 2014 年推出 HW 1.0 开始,特斯拉 Autopilot 系统共经历了 4 次大的硬件版本更新。在 2014年-2016 年的 HW 1.0 时代,特斯拉完全基于 1 颗 Mobileye EyeQ3 和 1 颗NVIDIA Tegra 3,算法也完全由第三方供应商 Mobileye 提供,2016 年特斯拉逐渐不满于 Mobileye 进程缓慢以及相关安全事故,并在 2016 年的 HW 2.0 版本上,特斯拉切换到了由 1 颗 NVIDIA Parker SoC 和 1 颗 NVIDIA Pascal GPU组成的 NVIDIA DRIVE PX 2 计算平台,而在 2017 年的 HW 2.5 版本升级过程中,将 NVIDIA Drive PX 2 升级为 NVIDIA Drive PX 2+,新增了一个 NVIDIAParker SoC,获得了 80%左右的运算性能提升。
特斯拉从 Mobileye 到英伟达,最终走向 FSD 自研芯片。特斯拉从 2014 年推出 HW 1.0 开始,特斯拉 Autopilot 系统共经历了 4 次大的硬件版本更新。在 2014年-2016 年的 HW 1.0 时代,特斯拉完全基于 1 颗 Mobileye EyeQ3 和 1 颗NVIDIA Tegra 3,算法也完全由第三方供应商 Mobileye 提供,2016 年特斯拉逐渐不满于 Mobileye 进程缓慢以及相关安全事故,并在 2016 年的 HW 2.0 版本上,特斯拉切换到了由 1 颗 NVIDIA Parker SoC 和 1 颗 NVIDIA Pascal GPU组成的 NVIDIA DRIVE PX 2 计算平台,而在 2017 年的 HW 2.5 版本升级过程中,将 NVIDIA Drive PX 2 升级为 NVIDIA Drive PX 2+,新增了一个 NVIDIAParker SoC,获得了 80%左右的运算性能提升。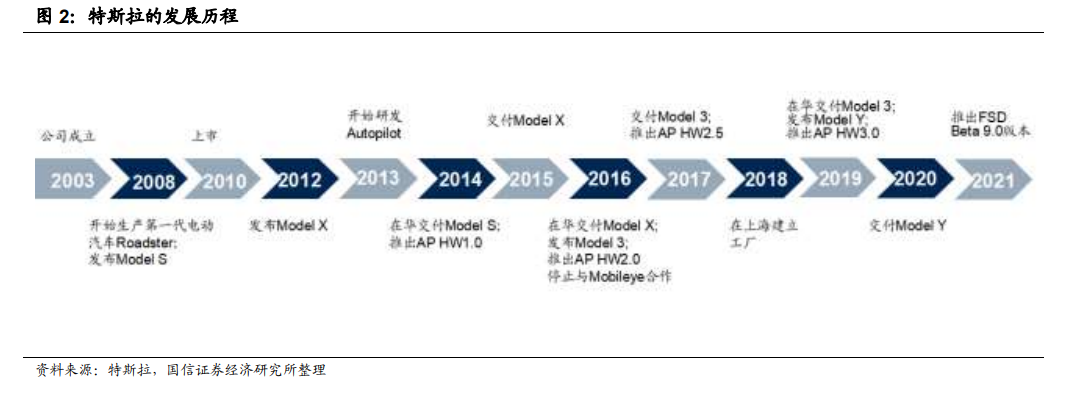 特斯拉即将发布 HW 4.0 平台,基于三星 7nm 工艺的 FSD 自研芯片,其性能将是 HW 3.0 的三倍。由于英伟达的高能耗,2017 年起,马斯克决定开始自研主控芯片,尤其是主控芯片中的神经网络算法和 AI 处理单元全部由特斯拉自主完成。在 2019 年 4 月份,特斯拉在 Autopilot HW 3.0 平台上成功推出自研的FSD 主控芯片,实现了自动驾驶芯片+神经网络算法的垂直整合。特斯拉计划将在不久的未来 HW 4.0 版本,基于三星 7nm 工艺的全新 FSD 自研芯片,其性能将是 HW 3.0 的三倍。
特斯拉即将发布 HW 4.0 平台,基于三星 7nm 工艺的 FSD 自研芯片,其性能将是 HW 3.0 的三倍。由于英伟达的高能耗,2017 年起,马斯克决定开始自研主控芯片,尤其是主控芯片中的神经网络算法和 AI 处理单元全部由特斯拉自主完成。在 2019 年 4 月份,特斯拉在 Autopilot HW 3.0 平台上成功推出自研的FSD 主控芯片,实现了自动驾驶芯片+神经网络算法的垂直整合。特斯拉计划将在不久的未来 HW 4.0 版本,基于三星 7nm 工艺的全新 FSD 自研芯片,其性能将是 HW 3.0 的三倍。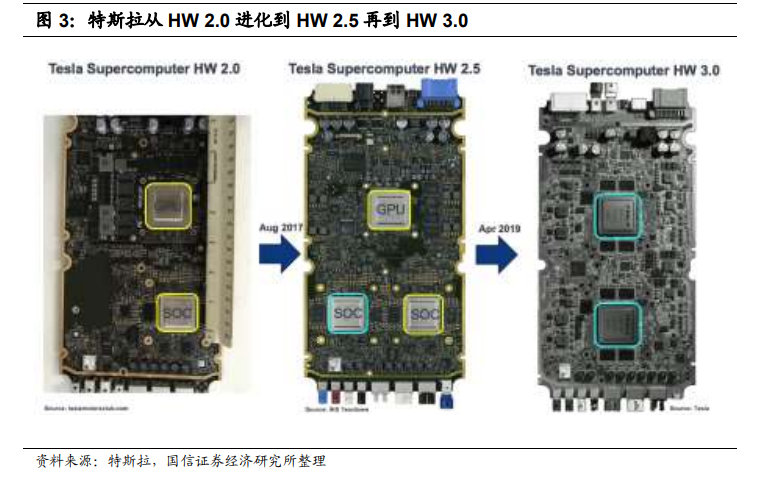
特斯拉从 Mobileye 到英伟达,最终走向 FSD 自研芯片。特斯拉从 2014 年推出 HW 1.0 开始,特斯拉 Autopilot 系统共经历了 4 次大的硬件版本更新。在 2014年-2016 年的 HW 1.0 时代,特斯拉完全基于 1 颗 Mobileye EyeQ3 和 1 颗NVIDIA Tegra 3,算法也完全由第三方供应商 Mobileye 提供,2016 年特斯拉逐渐不满于 Mobileye 进程缓慢以及相关安全事故,并在 2016 年的 HW 2.0 版本上,特斯拉切换到了由 1 颗 NVIDIA Parker SoC 和 1 颗 NVIDIA Pascal GPU组成的 NVIDIA DRIVE PX 2 计算平台,而在 2017 年的 HW 2.5 版本升级过程中,将 NVIDIA Drive PX 2 升级为 NVIDIA Drive PX 2+,新增了一个 NVIDIAParker SoC,获得了 80%左右的运算性能提升。
特斯拉即将发布 HW 4.0 平台,基于三星 7nm 工艺的 FSD 自研芯片,其性能将是 HW 3.0 的三倍。由于英伟达的高能耗,2017 年起,马斯克决定开始自研主控芯片,尤其是主控芯片中的神经网络算法和 AI 处理单元全部由特斯拉自主完成。在 2019 年 4 月份,特斯拉在 Autopilot HW 3.0 平台上成功推出自研的FSD 主控芯片,实现了自动驾驶芯片+神经网络算法的垂直整合。特斯拉计划将在不久的未来 HW 4.0 版本,基于三星 7nm 工艺的全新 FSD 自研芯片,其性能将是 HW 3.0 的三倍。



